Overview
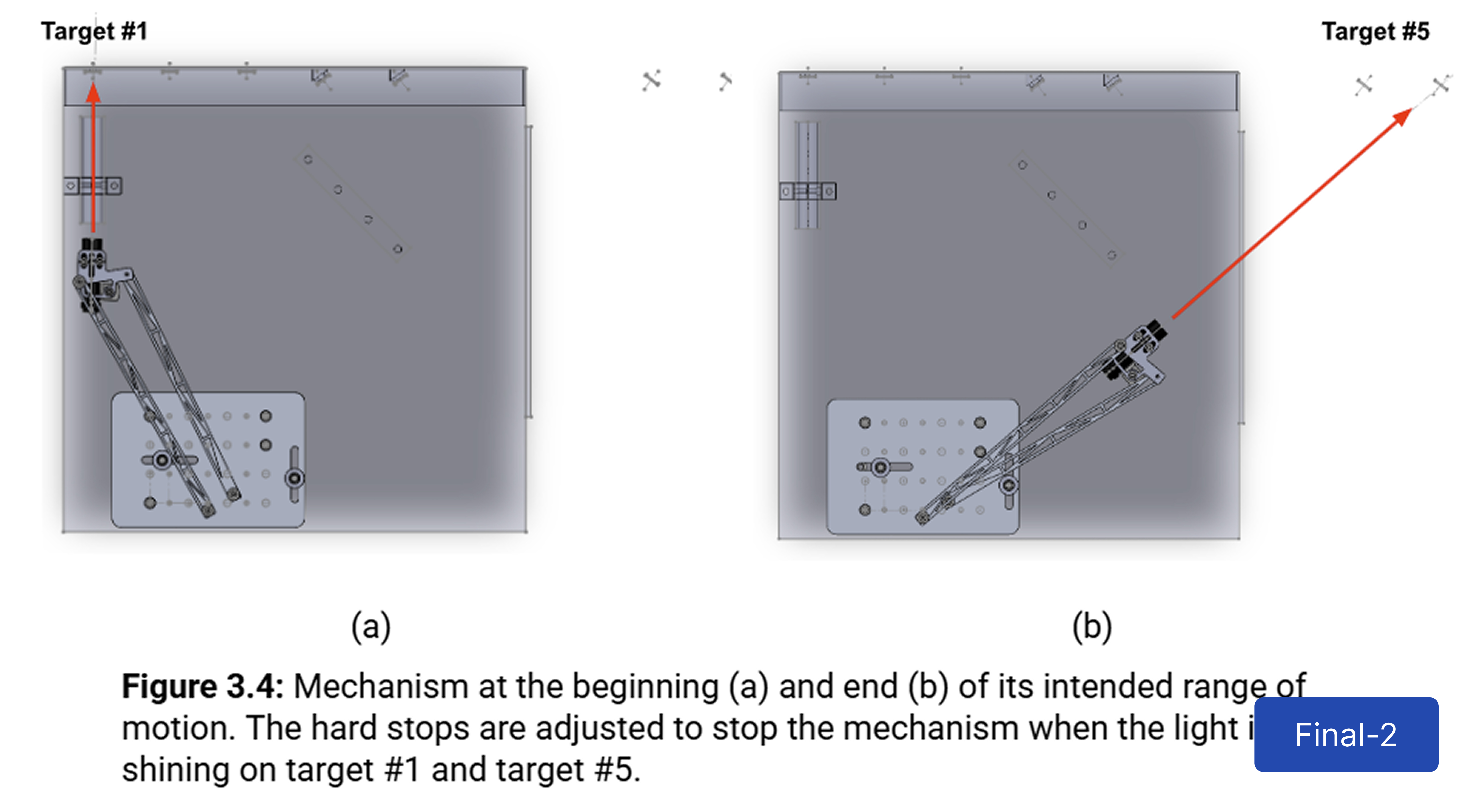
Designed, manufactured, and programmed a mechatronic linkage system to detect raised target flags and illuminate corresponding photosensors. Key goals included minimal transmission angle deviation (~11° achieved), ≥20% weight reduction via cutouts, self-zeroing within 30 seconds, and full sweep motion under 5 seconds (~0.8 s achieved). Evaluated for precision, lightweight design, reliability, and quick, safe assembly (<5 min setup).
Prototyping
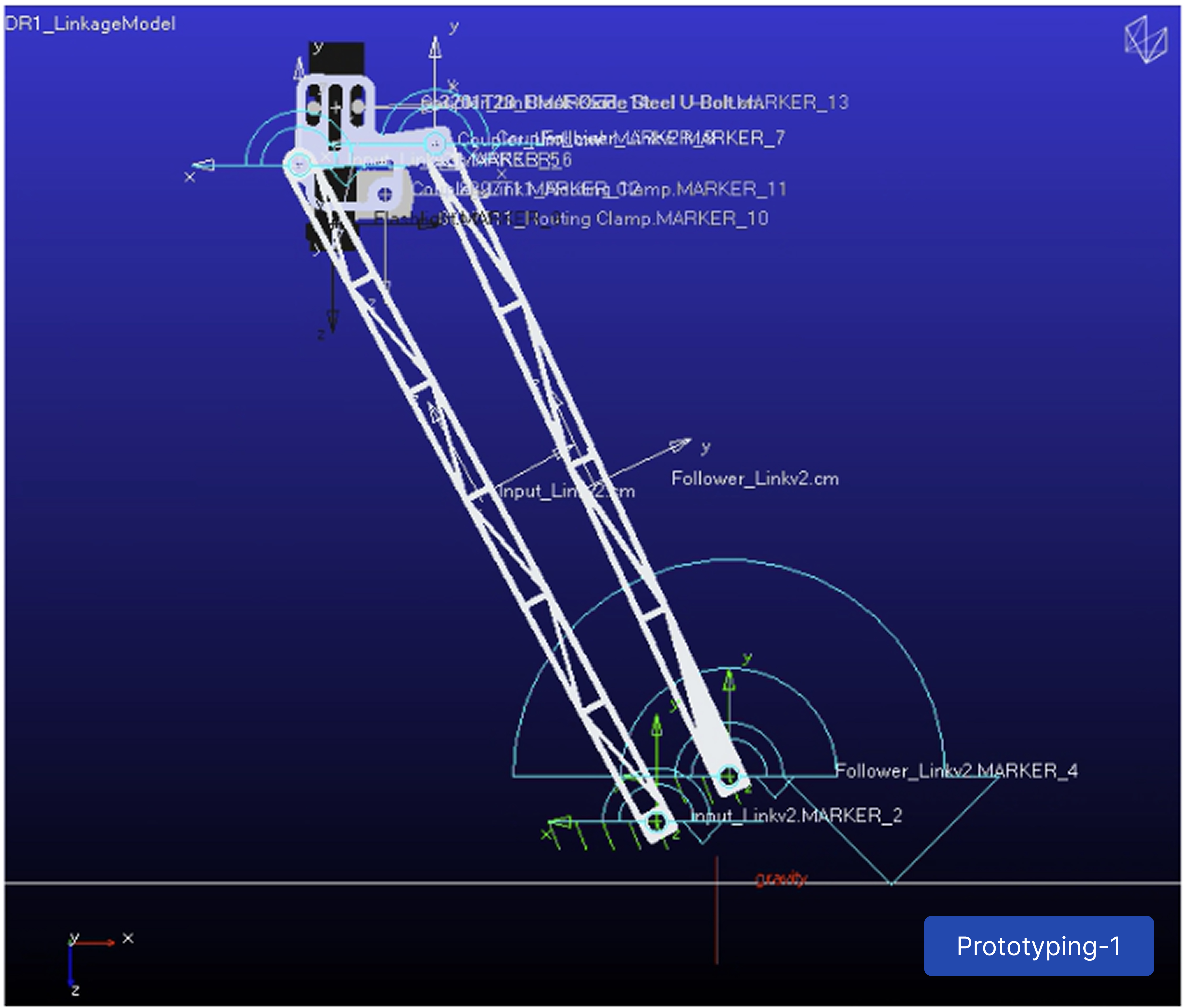
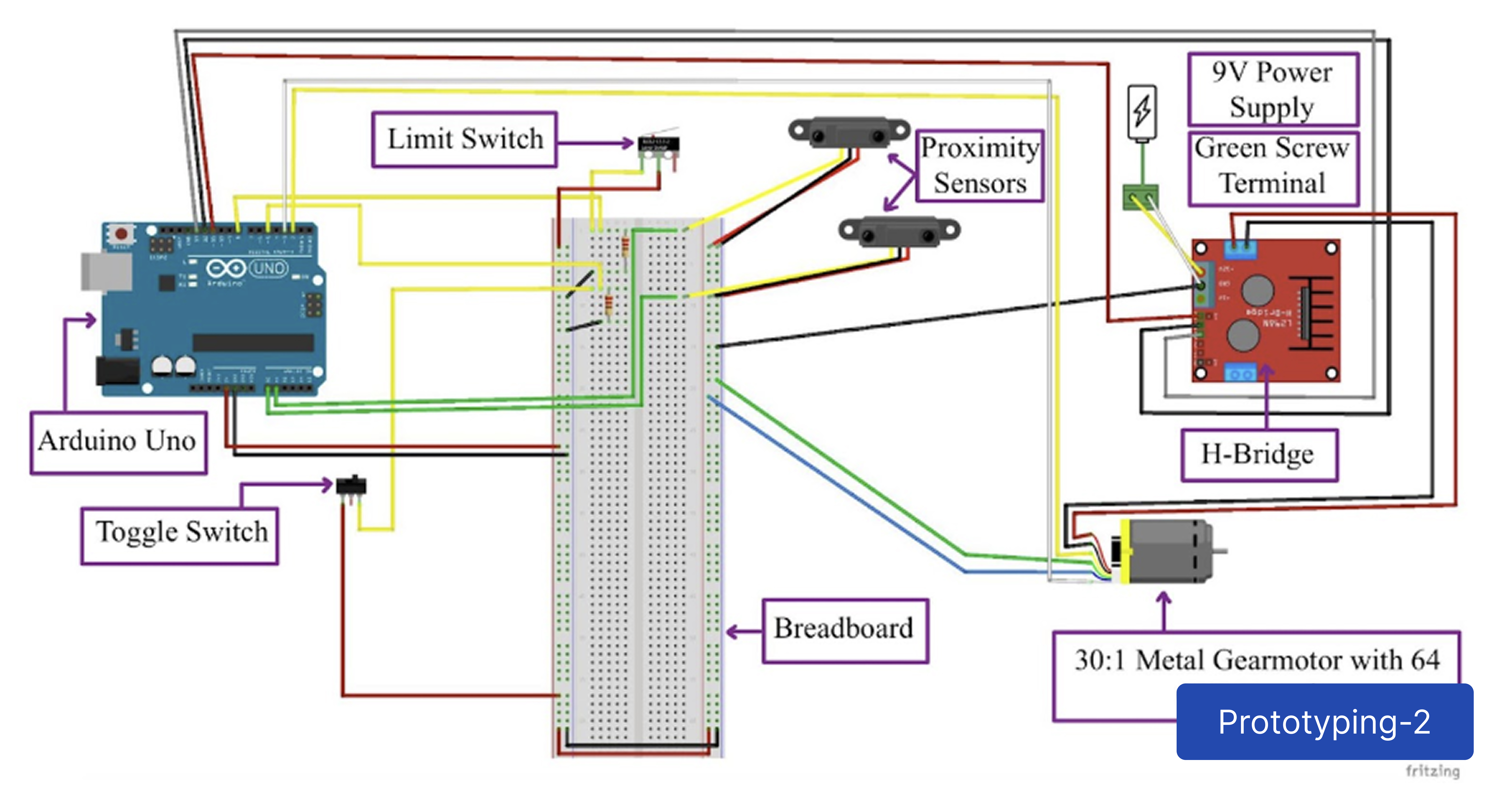
Generated and simulated multiple linkage concepts in ADAMS, evaluating sweep time, transmission angles, and power draw. Pugh analysis ranked your design highest for torque efficiency, accuracy, and manufacturability, leading to its selection.
Final Design + Construction
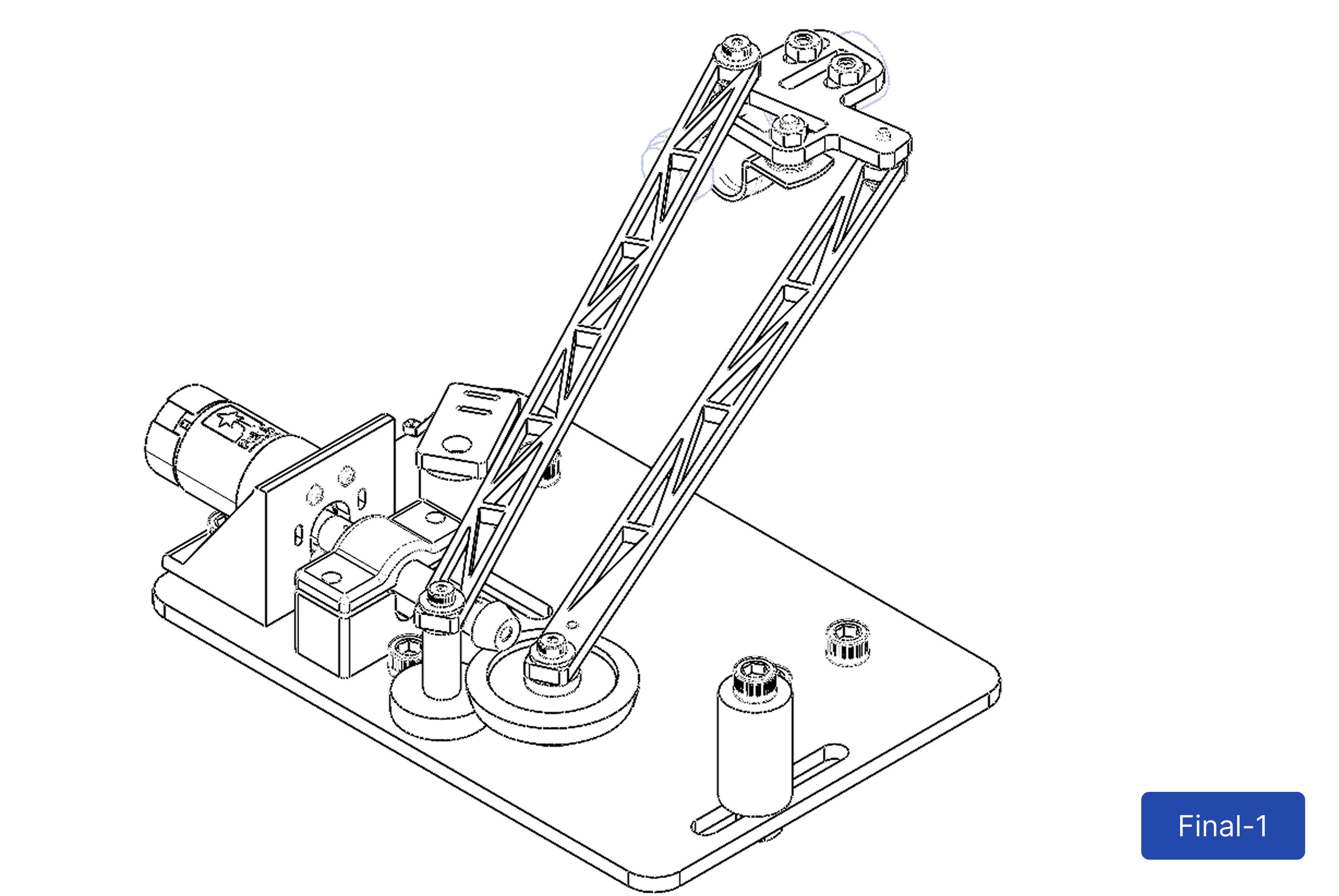
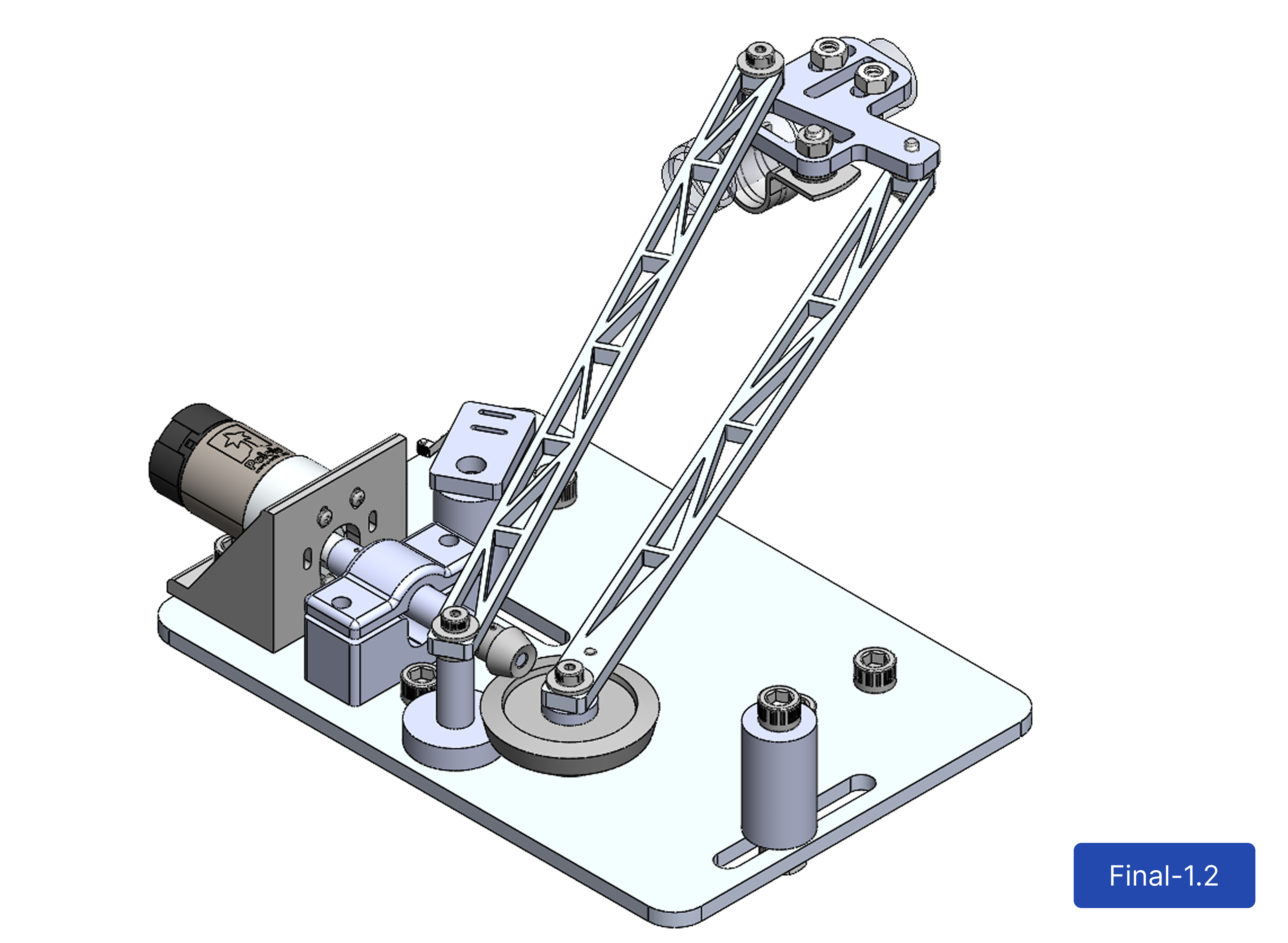
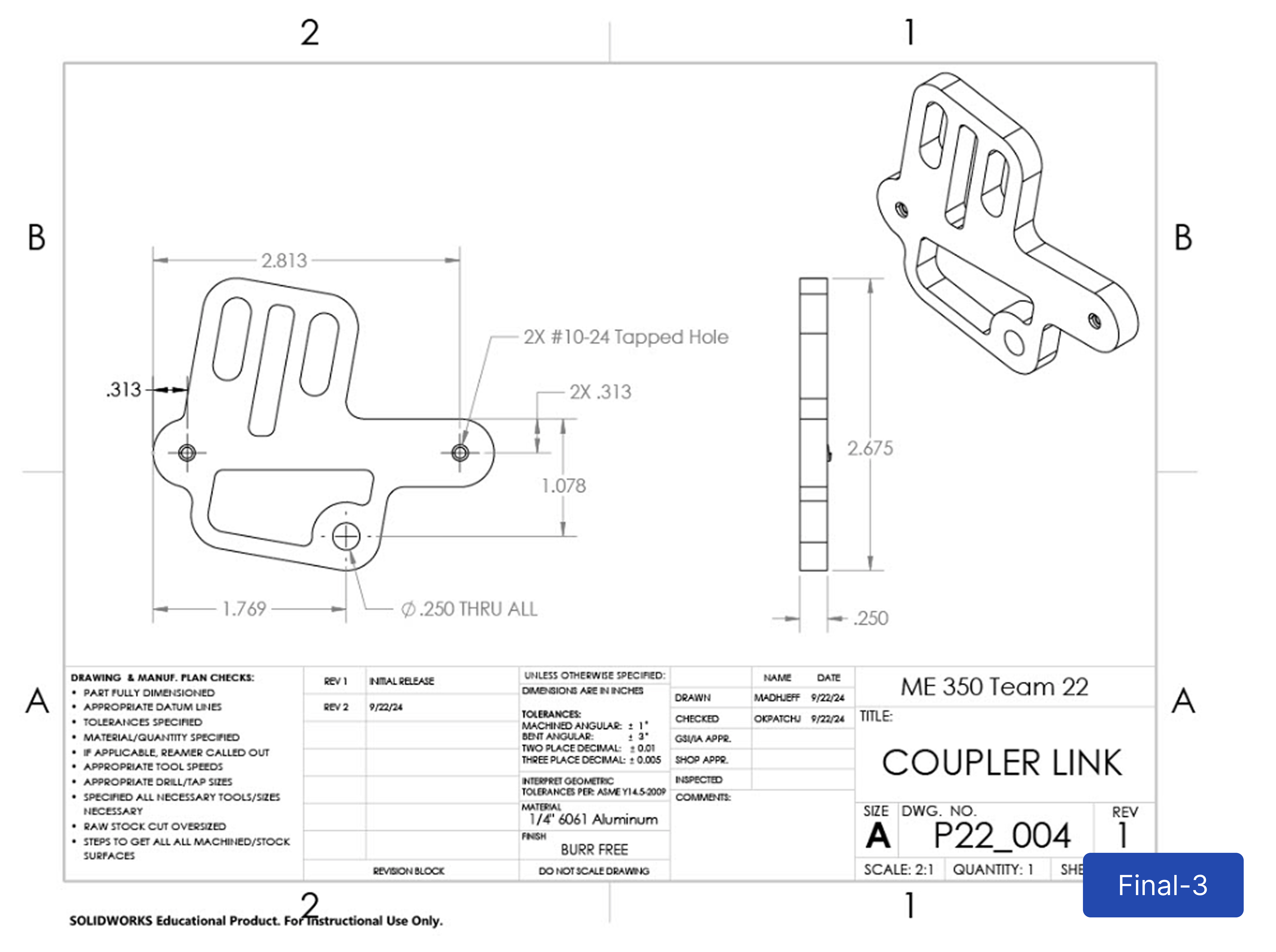
Developed a four-bar mechanism driving a mounted flashlight across five targets, using ¼" aluminum links with truss cutouts and steel fasteners for durability. Designed a 4:1 bevel gear transmission and adjustable mounts for calibration flexibility. Modeled, fabricated, and assembled all components in SolidWorks and via waterjet, machining, and 3D printing, incorporating friction-reducing bushings and washers. Verified performance through ADAMS simulations, torque/stress analysis (>8× safety factors), and PID motor control tuning. The system achieved fast, accurate, and repeatable targeting with self-zeroing capability, demonstrating robust, lightweight, and precise mechatronic design.
Designer / Team Member
Maddie J. / Nathan H. / Elijah P.