Overview
Developed team strategy and mechanical requirements for an RMP capable of cube collection, pushing, and terrain traversal. Each member proposed design sketches, leading to a unified concept refined through multiple design reviews. Built and assembled the full RMP, focusing on the most critical system first, and competed in final performance trials.
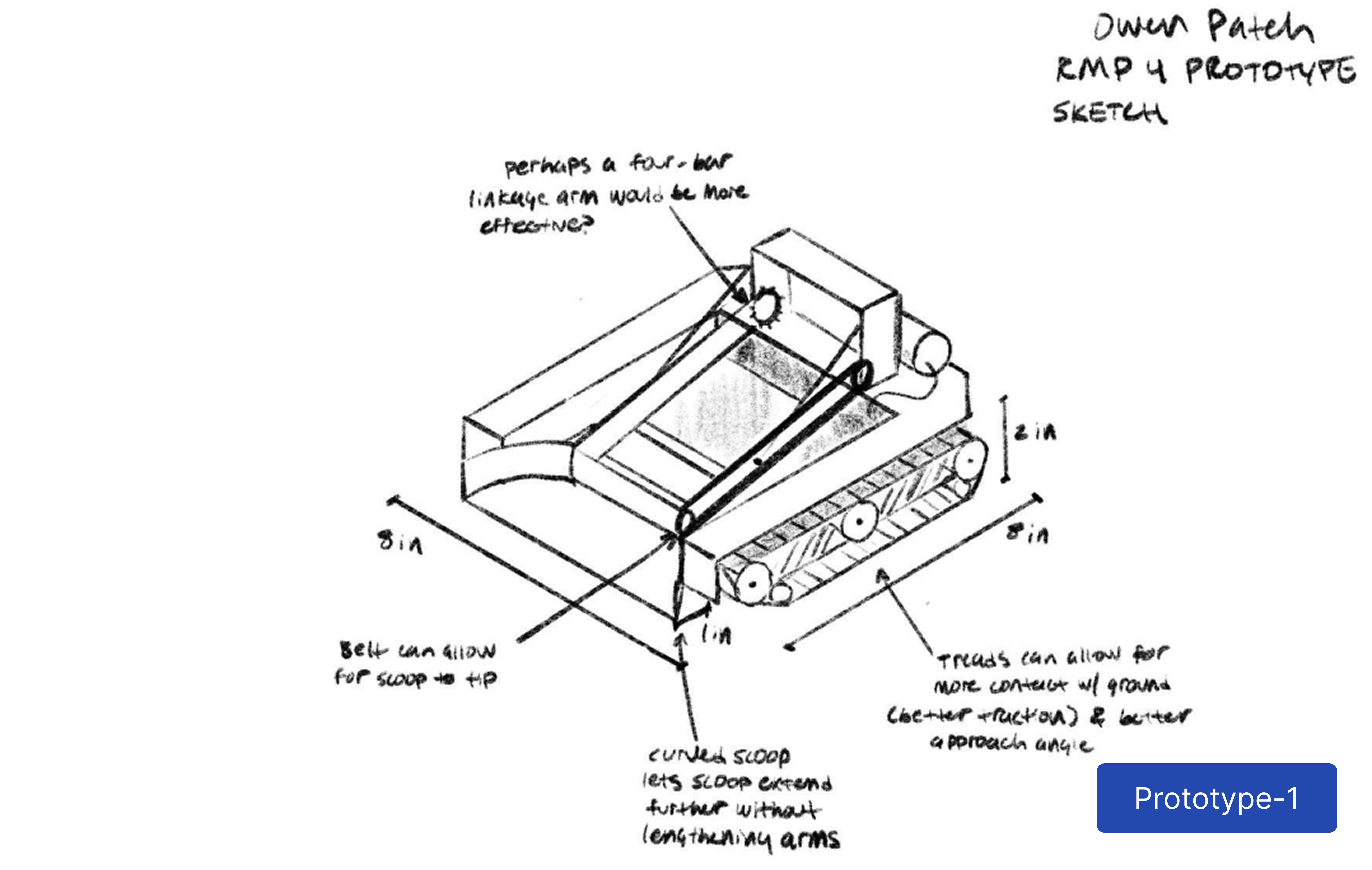
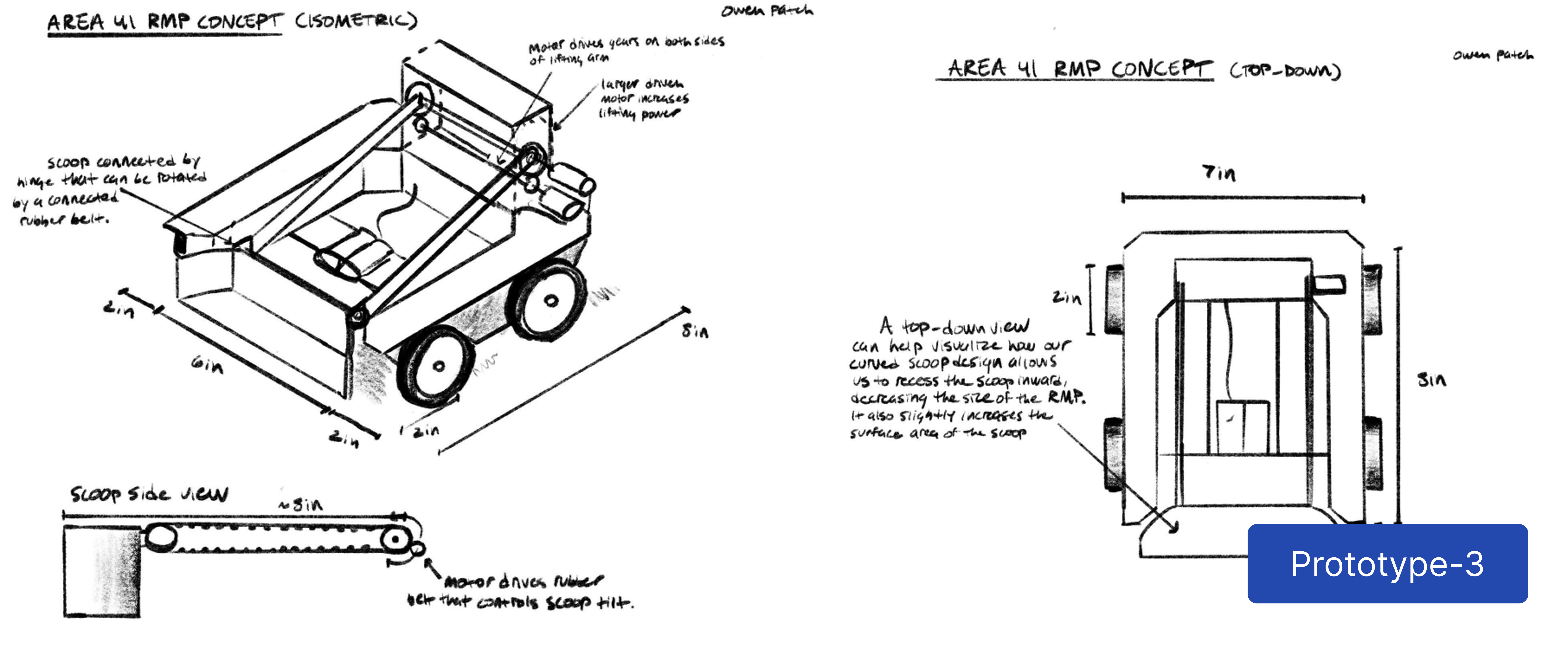
Prototyping
Eliminated unfeasible designs using Pugh analysis focused on function, manufacturability, and creativity. Led prototype development of key subsystems—including arm, scoop, and wheel designs—to optimize cube handling and traction. Iterative CAD and physical testing refined the design for balance, clearance, and simplicity, resulting in a practical, manufacturable solution.
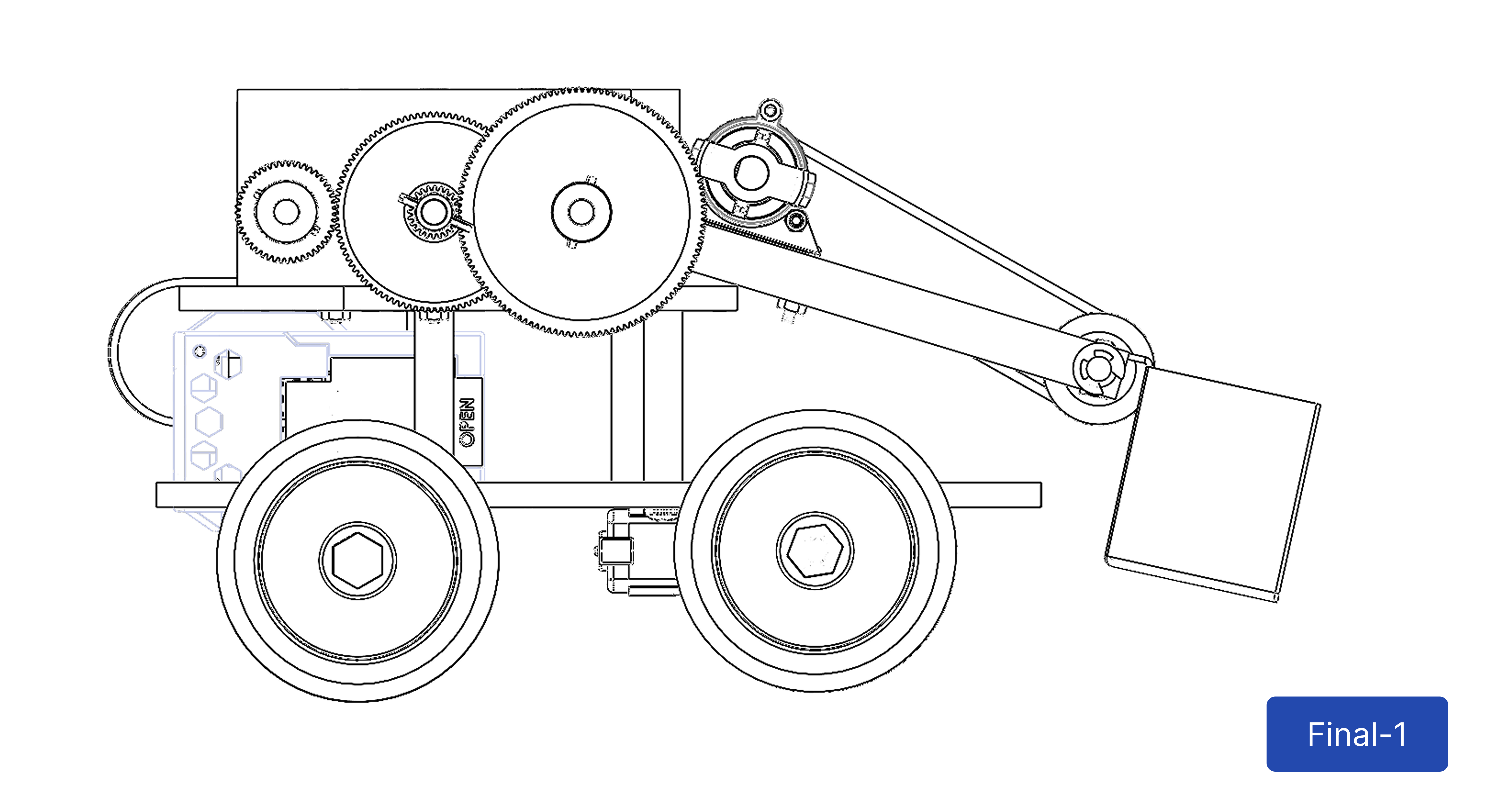
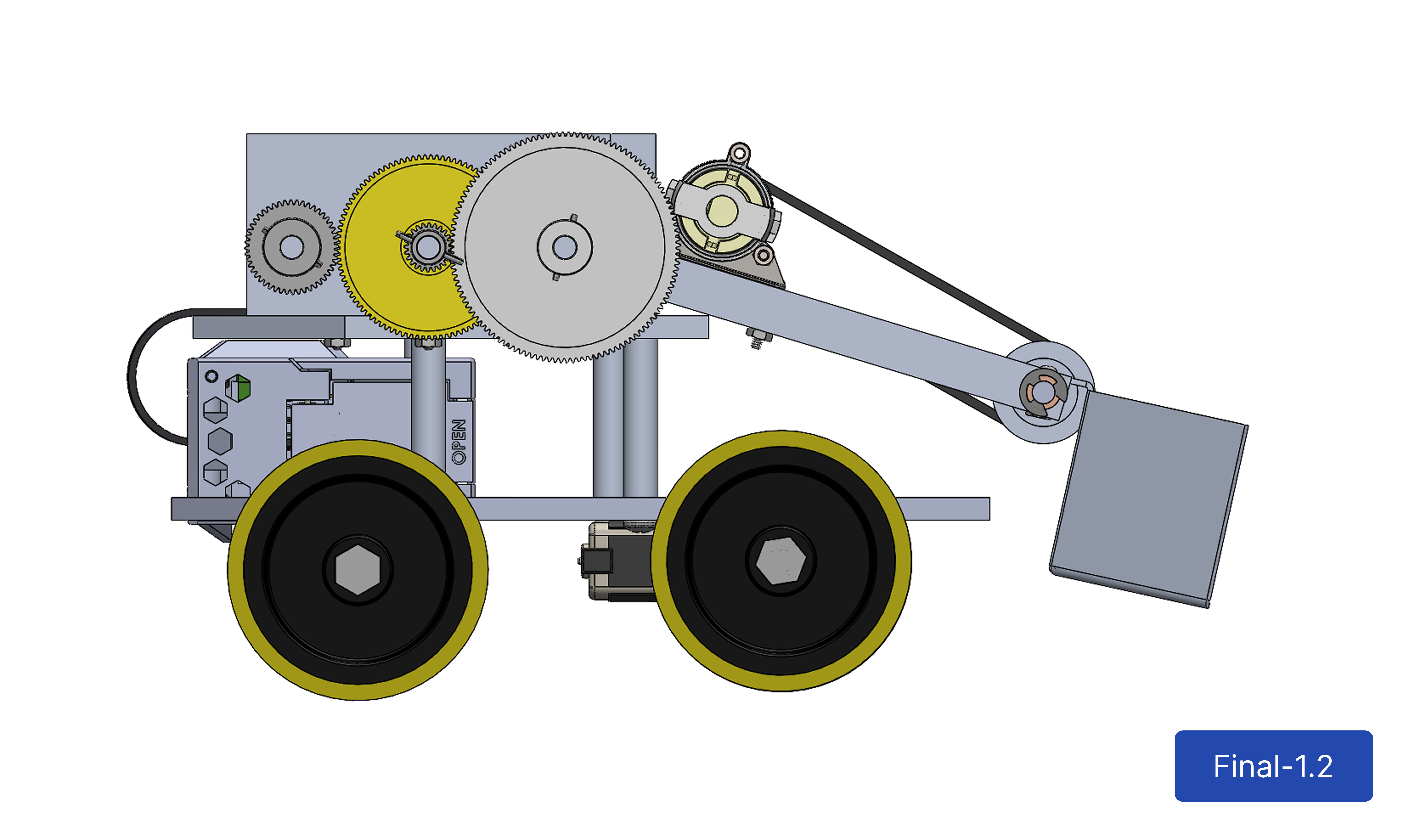
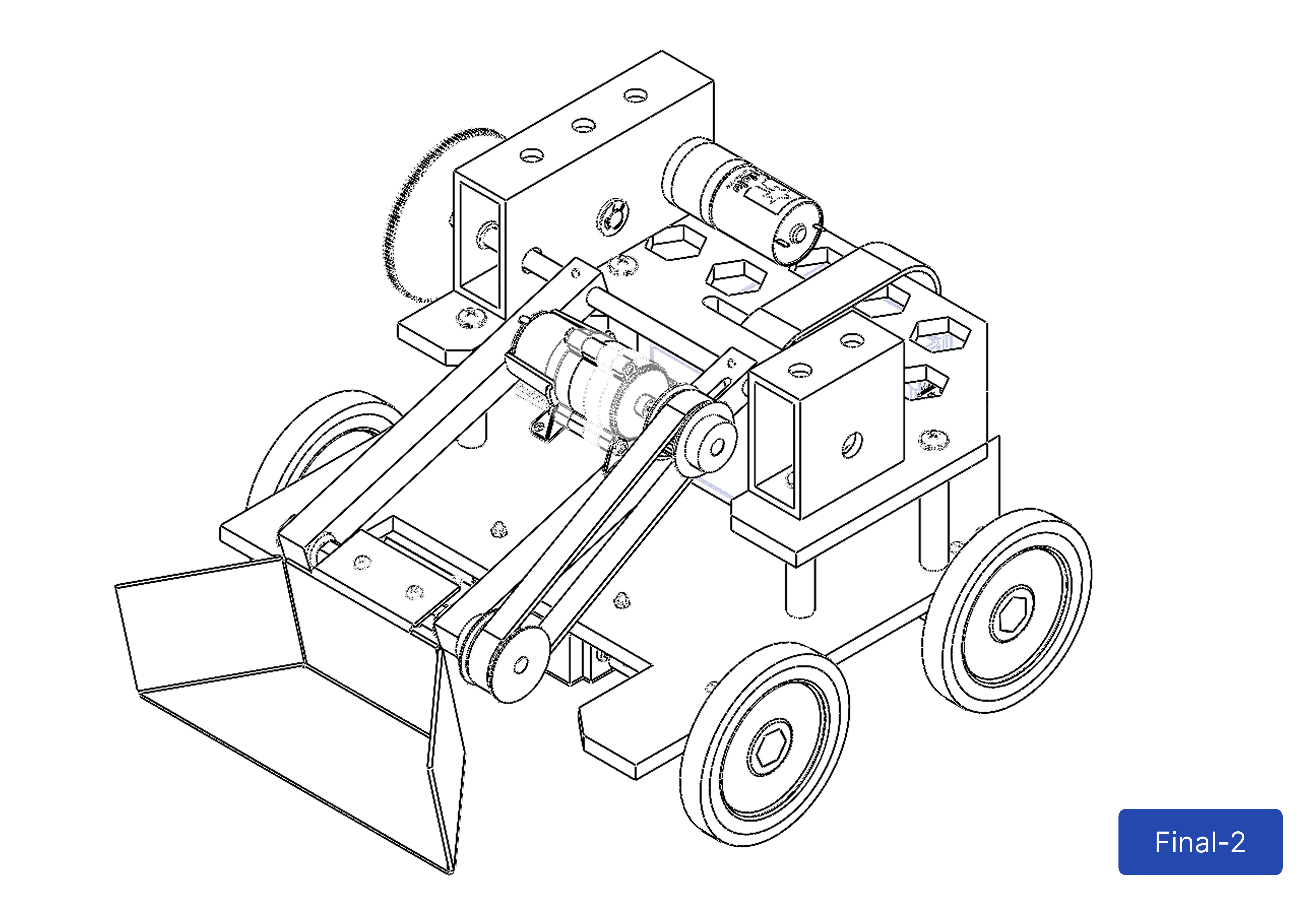
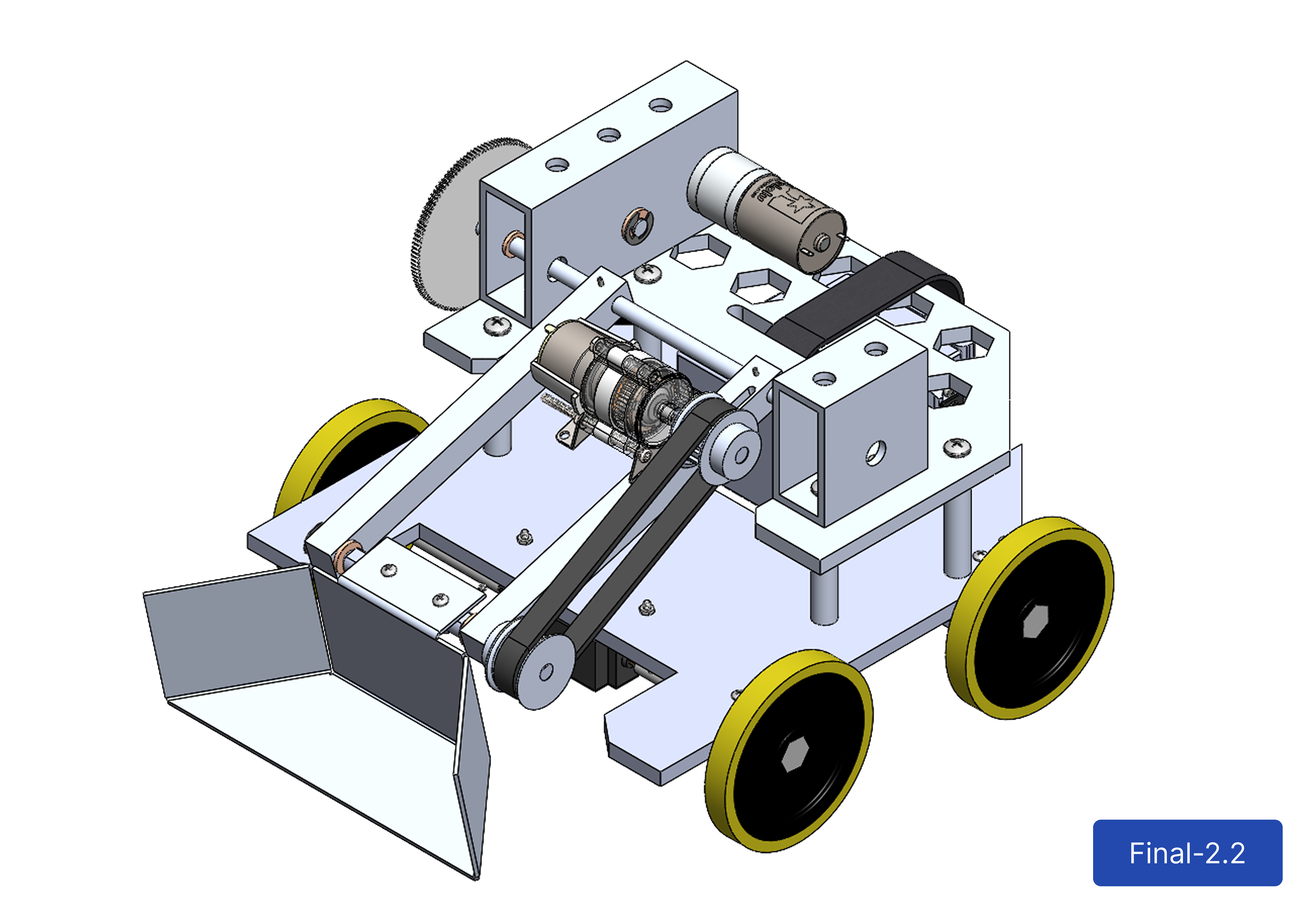
Final Design + Construction
Built a four-wheel-drive robot with a pivoting arm and scoop for efficient cube transport and placement. Used flat aluminum stock for quick, low-cost fabrication and standardized fasteners for easy assembly. Verified performance through torque modeling and testing, achieving reliable lift, transport, and ramp traversal. Led CAD design and fabrication, resolving alignment challenges and ensuring manufacturability and ease of assembly/repair. The final build lifted up to five cubes, climbed 35° ramps, and delivered consistent, repeatable performance under competition conditions.
Designer / Team Member
Owen S. / Tovya D. / Lex P. / Chris S.